The research team at DGIST developed ciliary microrobots with high propulsion efficiency in
Professor Choi’s research team succeeded in fabricating the world’s first ciliary microrobots utilizing
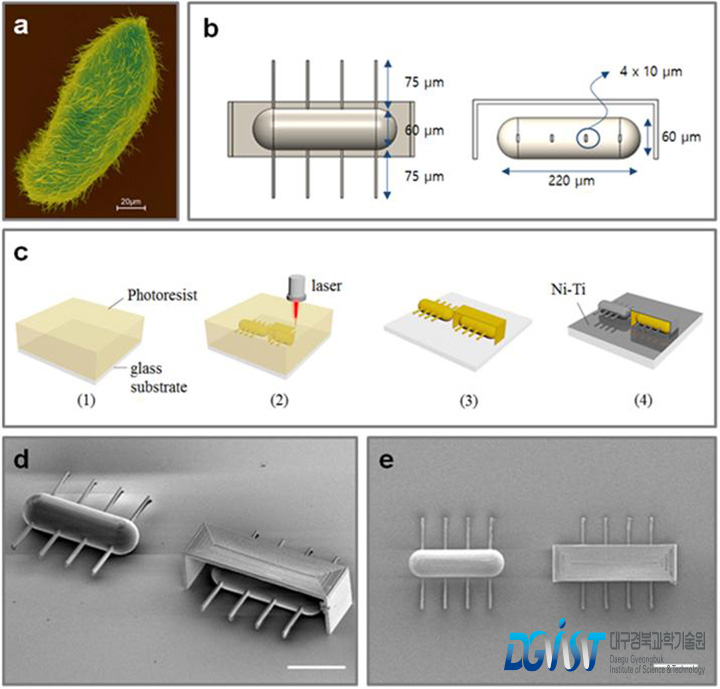
a) SEM image of microorganism, Paramecium, using ciliary stroke motion.
b) Design layouts for artificial ciliary microrobots.
c) Overall fabrication process for the ciliary microrobot using 3D laser lithography and metal sputtering.
d) SEM image of ciliary stroke motion microrobots developed by Prof. Choi’s research team (3D view, scale bar = 100 μm)
e) SEM image of ciliary stroke motion microrobots developed by Prof. Choi’s research team (top view, scale bar = 100 μm)
Microfluidic environments in which microorganisms move include highly viscous environments like the human body’s internal fluids; thus, in a macro environment, it is difficult to create propulsion with
Microrobots that use propulsion mechanisms such as spiral drive motion and progressive wave motion were first realized and implemented at the Zurich Federal Institute of Technology, Switzerland; University of Twente, Netherlands; and Harvard University, USA. However, the development of microrobots that move utilizing ciliary motion has thus far been absent due to the difficulty of producing a microstructure with a large number of cilia as well as with asymmetrical drive.
Professor Choi’s research team has produced a ciliary microrobot with nickel and titanium coating on top of
In addition, the team verified that the speed and propulsion efficiency of their
.gif)
The maximum speed of ciliary microrobots with a length of 220 micrometers and a height of 60 micrometers is 340 micrometers per second, thus they can move at least 8.6 times faster and as much as 25.8 times faster than conventional microrobots moving under magnetic attraction drive.a) Screen capture of linear motion of ciliary microrobots according to reciprocating magnetic drive under magnetic field control
b) Screen capture of rotary motion of ciliary microrobots according to reciprocating magnetic axis rotation under magnetic field control
c) The movement of ciliary microrobots tracing the letters D. G. I. S. T.
In comparison to previously developed microrobots, Professor Choi’s ciliary microrobots are expected to deliver higher amounts of chemicals and cells to target areas in the highly viscous body environment thanks to their ability to freely change direction and to move in an 80
Professor Choi from DGIST’s Department of Robotics Engineering said, «With precise
This research outcome was published in the online edition of Scientific Reports, a sister publication of Nature, on July 29, 2016. Professor Choi


